
Representación artística de robot corriendo. Crédito de la imagen: Wallhere
Al usar un modelo musculoesquelético para replicar la marcha a velocidad variable similar a la humana, los investigadores lograron un avance significativo en la robótica. Este modelo, dirigido por un método de control reflejo que se asemeja al sistema nervioso humano, mejora nuestra comprensión de la locomoción humana y establece nuevos estándares para la tecnología robótica.
El estudio optimizó la eficiencia energética utilizando un algoritmo innovador. Este progreso abre la puerta a futuras innovaciones en robots bípedos, prótesis y exoesqueletos motorizados.
Caminar es una tarea complicada, pero normalmente no lo pensamos mientras lo hacemos. Nuestro sistema nervioso es responsable de que nuestros huesos, articulaciones, músculos, tendones, ligamentos y otros tejidos conectivos se muevan de manera coordinada y respondan de manera muy eficiente a cambios o perturbaciones inesperados a velocidades variables. No es poco lograr replicar esto en tecnologías robóticas.
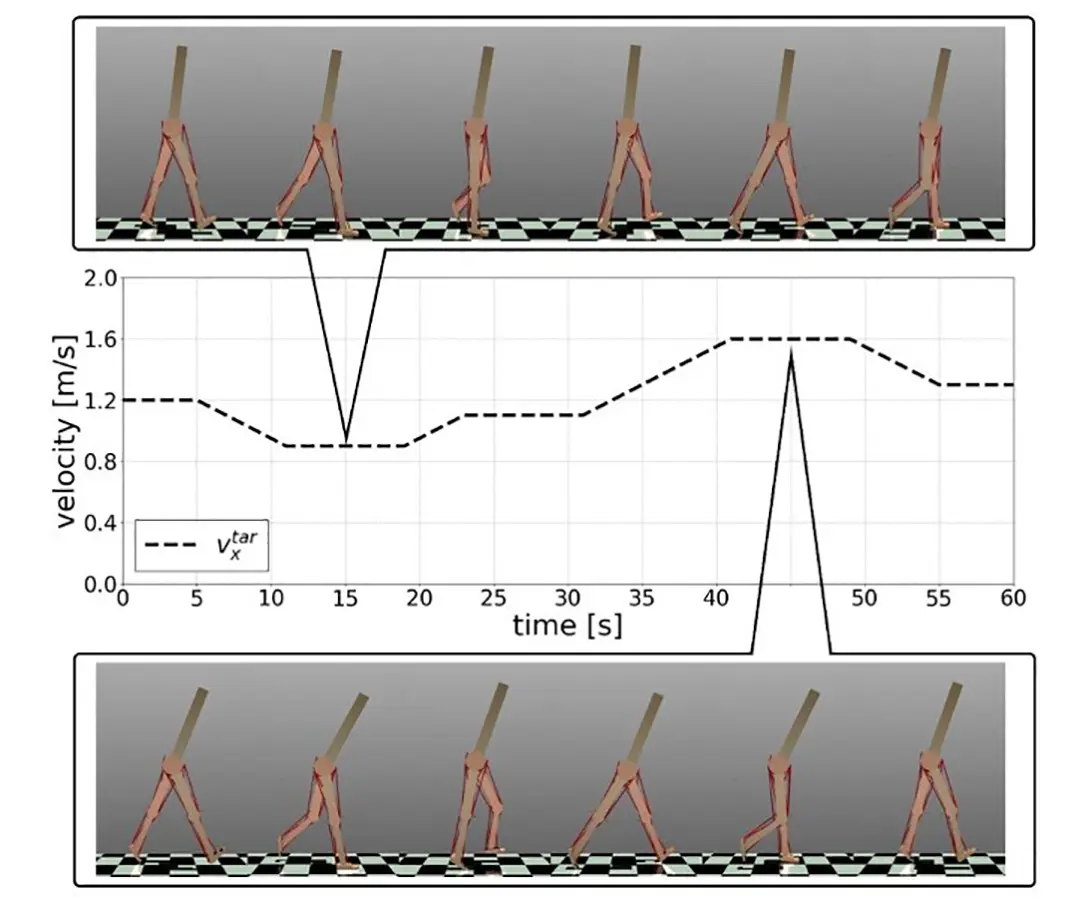
Identificación de factores esenciales para el control de la marcha con eficiencia energética en una amplia gama de velocidades. Crédito del video: Shunsuke Koseki / Mitsuhiro Hayashibe / Dai Owaki
Un grupo de investigación de la Escuela de Graduados en Ingeniería de la Universidad de Tohoku, ha replicado la marcha a velocidad variable similar a la humana utilizando un modelo musculoesquelético, dirigido por un método de control reflejo que imita el sistema nervioso humano. Este avance en la biomecánica y la robótica marca un nuevo punto de referencia para la comprensión del movimiento humano y abre la puerta a futuras tecnologías robóticas.
Los detalles de su estudio se publicaron en la revista PLoS Computational Biology el 19 de enero de 2024.
El profesor asociado Dai Owaki, quien ha colaborado en el estudio con Shunsuke Koseki y el profesor Mitsuhiro Hayashibe, afirma que su investigación ha abordado el complejo desafío de replicar la marcha eficiente a varias velocidades, una piedra angular del mecanismo de marcha humana. Estos conocimientos son esenciales para expandir los límites de la comprensión de la eficiencia, adaptación y la locomoción humana.

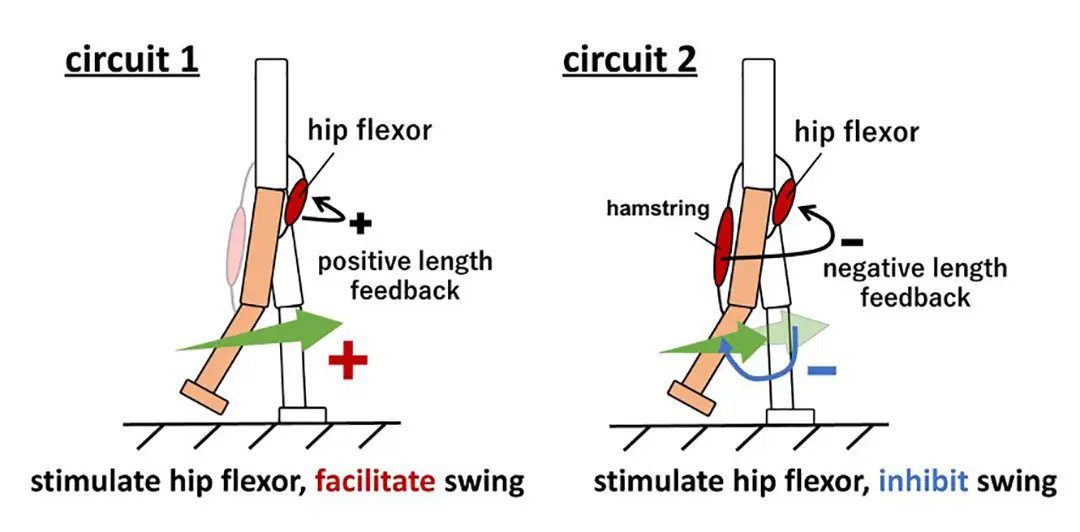
Un algoritmo innovador permitió el logro. Más allá del método de mínimos cuadrados tradicional, el algoritmo ayudó a desarrollar un modelo de circuito neuronal optimizado para la eficiencia energética en diferentes velocidades de caminata. Un examen minucioso de estos circuitos neuronales, en particular, los que regulan los músculos durante la fase de balanceo de las piernas, reveló aspectos cruciales de las técnicas de caminata para ahorrar energía. Estos descubrimientos nos ayudan a comprender mejor los complejos mecanismos de las redes neuronales que sustentan la marcha humana y su eficacia.
Owaki enfatiza que los hallazgos del estudio ayudarán a sentar las bases para los avances tecnológicos futuros. La reproducción exitosa de la marcha a velocidad variable en un modelo musculoesquelético, junto con circuitos neuronales avanzados, representa un hito importante en la integración de la neurociencia, la biomecánica y la robótica. Revolucionará el diseño y desarrollo de robots bípedos de alto rendimiento, prótesis y exoesqueletos de última generación.
Estos desarrollos podrían mejorar las soluciones de movilidad para personas con discapacidades y avanzar en las tecnologías robóticas utilizadas en la vida cotidiana.
Owaki y su equipo tienen la intención de mejorar aún más el sistema de control de reflejos en el futuro para imitar una mayor variedad de velocidades y movimientos al caminar humanos. Además, tienen la intención de utilizar los conocimientos y algoritmos que han obtenido de la investigación para desarrollar prótesis, trajes eléctricos y robots bípedos más adaptables y energéticamente eficientes. Esto implica integrar los circuitos neuronales que se han identificado en estas aplicaciones para mejorar su funcionalidad y naturalidad de movimiento.
REFERENCIAS
Identifying essential factors for energy-efficient walking control across a wide range of velocities in reflex-based musculoskeletal systems: https://journals.plos.org/ploscompbiol/article?id=10.1371/journal.pcbi.1011771